
Lehrstuhl für Angewandte Mathematik
Professor Dr. Michael Dellnitz
Die primäre Stärke dieses Lehrstuhls ist die Entwicklung effizienter Algorithmen für die numerische Behandlung von Dynamischen Systemen und Optimierungsproblemen. Die Forschungsaktivitäten konzentrieren sich sowohl auf die theoretischen Aspekte dieser Algorithmen als auch deren numerische Umsetzung.
- Dynamische Systeme
- Mehrzieloptimierung und -optimalsteuerung
Aktuelle Forschungsprojekte:
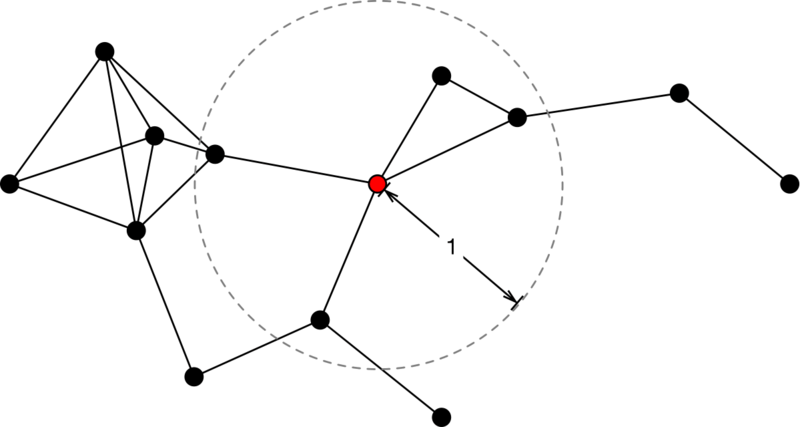

Das Ziel dieses Projekts ist es, die Möglichkeiten und Grenzen lokaler, verteilter Strategien für Schwärme mobiler Roboter zu untersuchen. Solche Strategien bestehen aus Protokollen, die von den einzelnen Robotern ausgeführt werden. Sie sollen die Bewegungen der Roboter so lenken, dass aus einer beliebigen Ausgangskonfiguration der Roboter global eine vorgegebene Formation wie das Sammel, die Linienbildung oder andere Formen erreicht wird. Diese Forschungsrichtung ist im "Distributed Computing" etabliert. Unser Ansatz besteht darin, Techniken aus dem Distributed Computing und der Theories der dynamischer Systeme zu kombinieren, um das Verständnis von Protokollen für solche Formationsaufgaben zu verbessern. Dazu analysieren wir die Geschwindigkeit der Protokolle hinsichtlich Laufzeitkomplexität im Sinne des Distributed Computing sowie Stabilitätseigenschaften der vorgeschriebenen Formation unter Verwendung von Ideen dynamischer Systeme. Während in der Distributed-Computing-Community oft nur eine Worst-Case-Analyse betrachtet wird, erlauben die Werkzeuge dynamischer Systeme eine feinere Analyse der Eingangskonfigurationen durch die Untersuchung des Zustandsraums. Konkreter beschreibt die "State-Space-Foliation" das langfristige dynamische Verhalten von Eingabekonfigurationen detaillierter, d.h. sie erlaubt es, Klassen von Konfigurationen zu identifizieren, die vergleichsweise schnell oder langsam konvergieren, und sogar Klassen, die nicht zur vorgeschriebenen Formation konvergieren. Somit führt die Kombination beider Sichtweisen zu einem tieferen Verständnis verteilter Strategien für Schwärme mobiler Roboter.

